A Video Driver System Designed Using a Top-Down,
Constraint-Driven Methodology
Iasson Vassiliou, Henry Changy , Alper Demir, Edoardo Charbony , Paolo Miliozzi,
Alberto Sangiovanni-Vincentelli
University of California, Berkeley CA, USA. y Cadence Design Systems, San Jose CA, USA.
Abstract
To accelerate the design cycle for analog and mixed-signal systems, we have proposed a top-down,constraint-driven design methodology. The key idea of the proposed methodology is hierarchically
propagating constraints from performance specifications to layout.
Consequently, it is essential to provide the necessary tools and techniques enabling the efficient constraint propagation. To illustrate
the applicability of the proposed methodology to the design of larger
systems, we present in this paper the complete design flow for a video
driver system. Critical advantages of the methodology illustrated
with this design example include avoiding costly low level re-designs
and getting working silicon parts from the first run. Following our
approach, a jitter constraint is imposed at the system level and then
is propagated hierarchically to the circuit blocks and layout, using
behavioral modeling and simulation. Experimental results are presented from working fabricated parts.
1 Introduction
The complexity of analog mixed-signal electronic systems has
been increasing rapidly over the past years. Since, unlike its
digital counterpart, analog circuit design is not supported by
fully automatic synthesis tools, there is a great need for efficient tools and techniques to accelerate the analog design cycle. To facilitate the design of analog and mixed analog-digital
circuits, we have proposed a “Top-Down, Constraint-Driven
Design Methodology” [1]. The key idea of the methodology is the hierarchical propagation of constraints based on
behavioral modeling and optimization. At each level of the
design hierarchy, performance constraints are mapped onto
constraints on the parameters characterizing the blocks of the
subsequent level of the hierarchy. At the highest level, behavioral simulation and optimization can be used to evaluate
different architectures. Once an architecture has been chosen,
the process is repeated until the layout is generated or a module meeting the constraints is found in the library. Behavioral
modeling and simulation allow for early detection of design
faults and efficient exploration of the design space. Since
models have to be estimated at high levels in the hierarchy,
a bottom-up verification is also essential to fully characterize
components, interconnects and parasitics.
Presented in this paper is the design process for a video
driver system. New behavioral modeling, optimization, and
ICCAD ’96
1063-6757/96 $5.00 1996 IEEE
Color in
DAC
R
DAC
G
DAC
B
Digital Interface
Frequency
Fout
Synthesizer
Fin
n
m
k
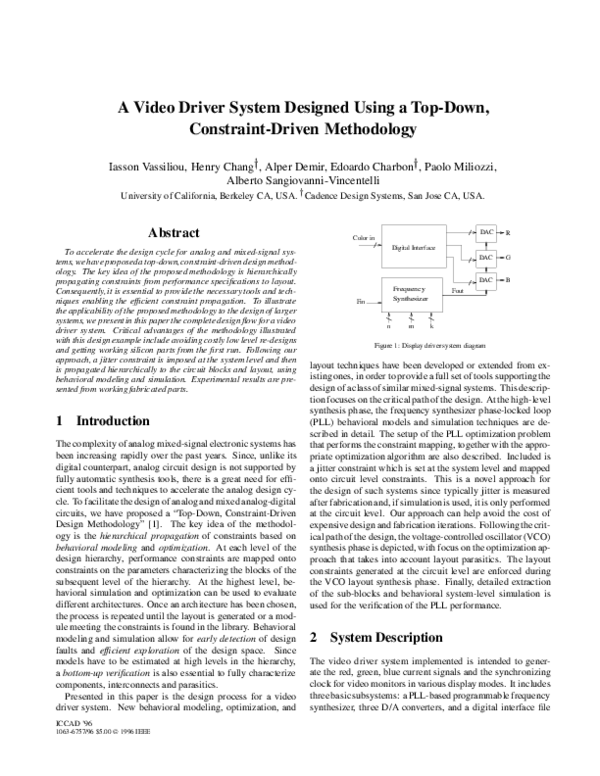
Figure 1: Display driver system diagram
layout techniques have been developed or extended from existing ones, in order to provide a full set of tools supporting the
design of a class of similar mixed-signal systems. This description focuses on the critical path of the design. At the high-level
synthesis phase, the frequency synthesizer phase-locked loop
(PLL) behavioral models and simulation techniques are described in detail. The setup of the PLL optimization problem
that performs the constraint mapping, together with the appropriate optimization algorithm are also described. Included is
a jitter constraint which is set at the system level and mapped
onto circuit level constraints. This is a novel approach for
the design of such systems since typically jitter is measured
after fabrication and, if simulation is used, it is only performed
at the circuit level. Our approach can help avoid the cost of
expensive design and fabrication iterations. Following the critical path of the design, the voltage-controlled oscillator (VCO)
synthesis phase is depicted, with focus on the optimization approach that takes into account layout parasitics. The layout
constraints generated at the circuit level are enforced during
the VCO layout synthesis phase. Finally, detailed extraction
of the sub-blocks and behavioral system-level simulation is
used for the verification of the PLL performance.
2 System Description
The video driver system implemented is intended to generate the red, green, blue current signals and the synchronizing
clock for video monitors in various display modes. It includes
three basic subsystems: a PLL-based programmable frequency
synthesizer, three D/A converters, and a digital interface file
�Type
Specification
Performance
Output Frequencies
Timing jitter
Video signal INL
Video signal DNL
DAC resolution
Supply voltage
Spice models
Design rules
Operation
Technology
Charge Pump
Value
�
�
�
Fref
Fout
Fin, Fout, jitter, resolution, technology, power supply
Video
Driver
System
3 D/As
Mirror
Array
Interface
PFD
Td
Td
Fo, Ko,
jitter
Ip, Rout
Qinj , Vsat
Ci
Wi ,
Li
K
Routing
For the PLL system design, constraints obtained from the
previous level of the hierarchy will be mapped onto an architecture and component parameter constraints. In this example
only one architecture is optimized. Typically though, more
architectures can be evaluated using behavioral simulation.
The architecture selected is a charge-pump PLL (Figure 3)
using a ring oscillator VCO and a phase-frequency detector
(PFD). The main advantage of this architecture is that it does
not require any external components and hence it can be easily
integrated. By changing the divider values, various integer
fractions of the input clock can be realized: Fout = MN�K �Fref .
PLL Behavioral Models
For the high-level mapping, a behavioral description of the
PLL has to be used. It is important that the behavioral models
are implementation independent and capture all the important
second order effects determining the performance of analog
circuits. A modified version of an event-driven behavioral
simulator for PLLs [3] was used, including more accurate
behavioral modeling of effects such as the PFD dead zone,
charge-pump charge injection and mismatch, and VCO saturation and nonlinearities. The PLL is described by a set of
differential equations:
@�i
R, C, C2
Charge
Pump
VCO
Dividers
Ri
digital
interface
PLL
VCO
Figure 3: PLL programmable frequency synthesizer
The idea of hierarchical design is not new by itself; what
makes this methodology valuable is providing the necessary
tools and techniques for fast and efficient hierarchical mapping
of the constraints. Therefore the behavioral simulation and
optimization tools used will be described in detail.
Ci
C2
C
N
3 High-Level Design
Td
PFD
Vc
register for loading the D/A converters and programming the
frequency synthesizer. This system is similar to commercial
display drivers except that the SRAM lookup table is not implemented. A general block diagram of the system is shown
in Figure 1. The specifications for the system are given in
Table 1. The synthesizer needs to generate a wide range of
frequencies to support different display modes.
jitter,
m,n,k,
finj
R
M
−Ip
Table 1: Video driver system specifications
INL,
DNL,
speed,
resolution
Loop Filter
Ip
25 to 135 MHz
1%
1 LSB
0:5 LSB
8 bits
5V
HP CMOS34
SCMOS
Ci
Loop
Filter
Ri
Routing
Ri
Routing
Figure 2: Video Driver System Hierarchy
The hierarchy of our design example contains two highlevel decompositions (Figure 2). For the first, the constraints
of Table 1 can be trivially decomposed into D/A and frequency synthesizer constraints. The D/A converter synthesis
hierarchy stops after the constraints are given, since a module
generator [2] is used for automatic synthesis from specifications. For the design of the file register, standard cell libraries
are used. The description of the methodology will focus on
the path highlighted in Figure 2. It is important to note that at
each level of the hierarchy, the performance deterioration due
to routing parasitics is taken into account.
@t
@Vc
@t
@Vx
@t
@�j
@t
=
2�fi (t)
=
Ip eff
=
=
where:
Ip eff
=
F (Vc (t))
=
C2
1
RC
Vc
(1)
1
RC2
1
RC
Vc +
�
Vx
(2)
Vx
2�F (Vc (t))nd ;
ST Ip (1 +
1
RC2
∆Ip
Ip
(3)
8j; j = 1 : : : nd
� ST )
ST
∆V
Rout
(4)
(5)
F0 + K0 Vc + : : : + Kn Vcn; Vc > Vsat (6)
The state variables �i , Vc , Vx , �j represent the phase of the
input clock, the VCO control voltage, the voltage on capacitor
C , and the phases of the nd stages of the VCO delay stages
respectively. ST = 0; 1; 1, depending on the state of the
PFD. F (Vc(t)) is the instantaneous VCO frequency.
�Pk+1
H k+1
U k+1
P0
S
Figure 5: Supporting Hyperplane Method
Figure 4: Jitter Flexibility Function
"
The PFD is modeled as a state-transition table. The state
transition events happen at the zero-crossing of the VCO output, i.e. �(t0 ) = n�. An iterative integration method is used
to compute the exact transition times, so that numerical noise
is minimized.
Even though many effects such as power supply and substrate coupling can contribute to the overall timing jitter, the
fundamental performance limit is due to the devices’ intrinsic
thermal noise. If careful design techniques are used, such as
differential architectures, separate power supplies and on-chip
decoupling capacitors, most coupling effects can be reduced
so that PLL timing jitter can be attributed mainly to thermal
noise, which is modeled as a white Gaussian random process.
The overall jitter is then predicted by adding random noise at
the time of each VCO transition and subsequently processing
the resulting waveform [3].
PLL High-Level Optimization
Since the behavioral description does not depend on the lowlevel implementation, we choose the high-level parameters by
optimizing for maximum design flexibility [1]. Flexibility is
a heuristic measure of the easiness to meet a set of design
specifications. Typically, parabolic and hyperbolic functions
are used. The flexibility function for parameter ∆� V COrms
is shown in Figure 4. The criterion used to build the flexibility functions was attributing f lex(x) = 10 for a parameter
value considered “hard”, and f lex(x) = 0 for a parameter
value considered “easy” to obtain. Those parameters were
heuristically adjusted. By using flexibility functions it is possible to consider design trade-offs at the system level in a
systematic way, without knowing the details of the implementation. This significantly accelerates the design process.
The performance constraints of the PLL are, stability in
the frequencies of operation, and timing jitter. Stability is
checked for the worst case configuration by imposing a maximum acquisition time. Jitter is also checked at the worst jitter
accumulation configuration. To ensure tolerance to parameter
variations, that can be as high as 30% of the nominal value, an
additional phase margin constraint is added. The optimization
problem can therefore be expressed as:
max
n
X
i=1
flexi(xi )
(7)
s:t:
6
1+s RC
2� (C + C2 ) s
1 + sR CC+CC22
#
�
2
∆� rms
fu
jfmax �
Tacq �
135o
(8)
50 ps
(9)
Tmax (10)
where fmax = 140 M Hz , fu is the unity gain frequency,
and n is the number of parameters used in the optimization:
Ko ; ∆� V CO ; Ip ; R; C; C2.
Most nonlinear optimization algorithms require accurate
computation of the first and/or second order derivatives for
convergence reasons. This may be difficult to obtain when
simulators are used to calculate the constraints. Furthermore,
the gradients of the constraint function are often not defined
outside the feasible region. This is the case of the PLL, where
timing jitter and acquisition time cannot be defined when the
system is unstable.
A quite efficient method to address such problems is the
supporting hyperplane method. The algorithm operates as follows: after an initial feasible point is given, an unconstrained
optimization is performed. Then, all nonlinear constraints are
checked and if the solution point Pk+1 is feasible, the algorithm
stops and the solution is a global minimum. If a constraint gi is
violated, then the point uk+1 is found on the line joining the initial feasible point P0 and the last solution Pk+1 , that lies on the
boundary of the feasible region S . Then a linear constraint is
added such as: rgj (uk+1 )(x uk+1 ) � 0. Consequently, the
linearized constrained optimization problem is solved again.
This process is repeated until a global minimum is found that
satisfies the nonlinear constraints. The algorithm is depicted
graphically in Figure 5. In order to guarantee convergence to
a global optimum, the feasible space must be convex.
In this algorithm, derivatives are only needed in the feasible
space, where the constraint functions are well defined. In
the case of the PLL a great problem is eliminated, since the
jitter constraint is not defined when the system is unstable.
However, the convexity requirement is a significant drawback
since it is hard to guarantee in most circuit design problems.
Even though it worked in the specific PLL case, the algorithm
could fail in more complicated optimization problems with
more variables.
The algorithm was implemented in C++. Behavioral simulation was used to compute the jitter and stability constraints.
The initial feasible point, found using behavioral simulation,
�Vdd
Parameters
K0 (MHz/V)
∆� V COrms (ps)
Ip (�A)
R (K Ω)
C (pF)
C1 (pF)
Constraints
∆� rms 50 ps (ps)
Phase margin 45o (o )
Flexibility
Final
40
3.33
15.8
200.5
57.8
5
Final
50.42
43.6
2.79
CPU Time (sec)
Iterations
7606.1
11
�
�
Initial
50
1.03
5
220
220
5
Initial
45
60
-48.9
Table 2: Optimization results
was externally provided to the optimizer. The phase margin
constraint was computed first to save CPU time. Since the jitter
constraint is the result of a Monte-Carlo simulation, the gradients computed can be quite inaccurate. An iterative method
was used to define the step for the finite differences. A large
step within the feasible region was initially used, which was
reduced until the value of the derivative became noisy. If a solution to the linear optimization problem could not be found,
the point at which the derivative was computed was moved
more “within” the feasible region. The possible loss of overall
optimality is of little concern, since a heuristic objective is
used. The results of the high-level optimization are summarized in Table 2. The tolerance of the optimization result to
worst-case parameter variations was verified using behavioral
simulation.
4 Low-Level Design
Following the methodology, the high-level parameters become
performance constraints for the low-level building blocks and
are mapped onto a sized architecture of transistors and layout
parasitics. A standard dead zone-free PFD was automatically
synthesized from high-level description using digital synthesis tools. For the charge-pump, a design similar to the one
described in [4] was used.
For the VCO, a ring oscillator VCO topology using differential cells with CMOS loads in triode region [5, 4] was selected
in order reduce the effect of power supply and substrate coupling. The oscillator consists of eight cells and its output is
converted to full CMOS swing via a level-restoring circuit.
A modified version of the cell topology described in [5] was
used. The topology of the cell with the bias circuit is shown
in Figure 6.
Optimization Taking into Account Parasitics
Following the proposed methodology, the performance constraints for the VCO must be mapped onto component values.
Vdd
Wpb
L pb
Wpb
Lpb
Iss
Wp
Lp
in+
W nb
+
L nb
Vd
Wn
Ln
+
Vd
out−
Vtune
Wn
Ln
−
−
in−
out+
(a)
(b)
Figure 6: VCO delay cell and bias circuit
To ensure that the performance constraints are met after the
layout is done, it is critical that layout parasitics are taken into
account during the optimization phase.
Let P a performance vector, C the parasitics vector and Pmax
the corresponding maximum allowed performance degradation due to those parasitics. Assuming a linear model around
the nominal performance and small parasitics, the performance
degradation ∆P i can be given by:
∆P i
h
=
i
SP
C
iT
�
∆C
(11)
i
SP
C is the sensitivity vector of performance Pi with respect
to the parasitics’ vector C and ∆C is the deviation from the
nominal estimate of the parasitics. Given a bound ∆Cmax on
the maximum allowed deviations from the nominal estimate
of the parasitics, we can force the optimization result to have
a reduced sensitivity to parasitics by imposing a constraint on
the maximum performance deterioration allowed.
The nominal estimate of the parasitics and the maximum allowed deviation are subsequently used to compute constraints
for the VCO layout generator. A maximum deviation of 50%
from a nominal estimate of 15 pF for the parasitics at the outputs of the differential gates were used. For the optimization,
only the critical device sizes, Wn ; Ln; Wp ; Lp were used as
parameters. The overall optimization problem for the VCO
can be expressed as:
Power(V CO)
s:t : Fmaxmin FmaxV CO
Fminmin FminV CO
∆� V COrms
min
�
�
�
�
� P �T
S
C
�
∆Cmax
�
�
Fmaxmax
Fminmax
∆� max
∆Pmax
(12)
(13)
(14)
(15)
(16)
The optimization problem was again solved using the supporting hyperplane algorithm with the initial feasible point
provided externally. All constraints were evaluated using
SPICE simulations except for the timing jitter constraint that
was evaluated using equations [6]. The sensitivities were
evaluated using finite differences. The sizes obtained were
Wn = 2:6 �m; Ln = 4 �m; Wp = 36 �m; Lp = 1 �m.
�f
begin
for-each(Pj )
f
f
gend
@P @P
for each(Ri ; Ci ) calculate( @Cj ; @Rj );
i
i
do
calculate(Rimax ; Cimax ); /* quadratic optimization*/
for-each(i)
set Wi = Wimin and Li = Limin =
Ci = C0 Wmin Lmin ;
do
W
evaluate Ri = � L i ;
i
if (Ri < Rimax ) then exit;
else Wi = Wi + ∆W ;
while (Ci < Cimax );
while ((Ci > Cimax ) or (Ri > Rimax ));
f
)
gg
Figure 7: Layout Generation Algorithm
5 Physical Design
The constraints set in the optimization problem of Equations 12 - 16 were used in the layout generation. Moreover,
constraints for all other parasitics were generated using the
constraint generation techniques described in [7]. The sensitivities of every performance parameter with respect to every
parasitic resistance and capacitance were calculated automatically using finite differences and then, given a maximum allowable performance deviation, bounds were imposed on every parasitic using quadratic optimization maximizing layout
flexibility.
A parametric layout generator was written for the specific
VCO topology. It uses a fixed floor-plan and takes as parameters the number of delay cells, the device sizes and the
parasitic constraints. Additional parasitic constraints were
generated for the parasitics that were not accounted for in the
circuit optimization. The algorithm for the layout generation
is shown in Figure 7. ∆W is the minimum increment allowed
by the process design rules, Pj is the performance j and i is
the number of the parametric wires.
The final layout for the video driver system was synthesized
using automatic routing tools. Different analog and digital
supplies were used and special supplies were provided for the
VCO in order to avoid as much as possible supply-coupled
noise which can contribute to timing jitter.
simulated is the control voltage of the VCO when the PLL is
in acquisition mode and is done to detect stability in the worst
case divide ratio. The waveforms from both simulations are
almost identical. The behavioral simulation completed in 560
CPU seconds, while the full circuit simulation took 20 CPU
hours (using macro-models for the dividers). Both simulations were performed in a DEC Alpha-Server 2100 5/250 with
256 Mb of memory and 4 CPU’s. Figure 8(b) shows the result of a behavioral simulation for the timing jitter using the
extracted parameters for Fout = 100 MHz . The plot shows
the square of the PLL and VCO rms timing jitter as a function
of the distance from the reference transition. As expected, the
open loop VCO jitter accumulates linearly to infinity, since
there is no correction from the PLL loop while the PLL jitter converges to a final value. The projected performance is
based only on the calculation of the thermal jitter of the VCO,
which sets the fundamental performance bound. Still, the performance of the actual system is expected to be close to the
one predicted since care has been taken to reduce as much as
possible all other jitter sources.
2
−21
2
DT x 10 sec
VC
7.00
4.00
6.00
5.00
SPICE
3.00
BEHAVIORAL
2.00
4.00
3.00
2.00
VCO
1.00
PLL
1.00
0.00
0.00
0.00
20.00
40.00
60.00
T x 10
80.00
−6
0.00
2.00
4.00
(a)
8.00
10.00
(b)
Figure 8: PLL Verification (a) acquisition (b) jitter
7 Experimental Results
The chip was fabricated on a MOSIS HP 1:0�m technology. A
die photo is shown in Figure 9. The 17,000 transistor system
occupies an area of 3.4 mm x 3.9 mm= 13.26 mm2 . A
6 Bottom-Up Verification
The value of behavioral modeling and simulation is apparent
in the verification phase of the PLL, which is an inherently
“stiff” system, often causing a full circuit simulation to be
impossible or unrealistic. Following the hierarchical verification approach, first the performance parameters of the PLL
building blocks were extracted using SPICE. The VCO timing jitter was extracted using the non-Monte Carlo, nonlinear
noise simulator described in [8]. Then, behavioral simulation
was used to verify the performance of the whole system.
In Figure 8(a), the result of a flat circuit simulation is compared to the result of the behavioral simulation. The waveform
6.00
T − Tref sec x 10−6
SEC
Figure 9: Video Driver System Die Photo
�lsb x 10
INL
−3
chip
chip
chip
chip
160.00
140.00
120.00
0R
0G
0B
1R
chip 1 G
chip 1 B
100.00
80.00
60.00
40.00
20.00
0.00
−20.00
−40.00
−60.00
0.00
50.00
100.00
150.00
200.00
250.00
code
Figure 10: INL Measurement Results
Figure 12: Frequency Synthesizer Output
8 Conclusions
Figure 11: Jitter Histogram
A complete design flow for a video driver system has been
presented, based on the top-down, constraint-driven paradigm.
Experimental results verify the validity of the design methodology. Fundamental to the approach was the use of behavioral
simulation and optimization for hierarchical constraint propagation. Combined with the tools used, this methodology can
have a significant impact on the design of similar systems
by reducing over-design, design times and costly fabrication
iterations.
Acknowledgments
This research was supported by SRC (96-DC-324).
printed circuit board was designed and manufactured in order
to measure the performance of the chip. Experimental results
show that the D/A INL and DNL performance is 0.16 LSB and
0.05 LSB respectively and that the settling speed requirements
are also met (Tset = 6 nsec). Figure 10 shows experimental
INL data from six D/A converters as a function of the input
code.
The PLL frequency generator meets the specifications for
generating frequencies from 25 MHz to 130 MHz. Figure 12
shows the output waveform at 130 MHz. A small deviation
from the expected speed in the upper edge of the specifications
is due to an error in the parameters file used in the synthesis
phase. Detailed timing jitter measurements were done using
a Tektronix 11801B high bandwidth digitizing oscilloscope
with the same waveform feeding the signal and the trigger
inputs. Figure 11 shows an output waveform at 100 MHz and
the corresponding jitter histogram at a transition edge 7 �s
from the reference, so that the accumulated jitter converges
to its final value. The rms jitter at 100 MHz is 65 ps (0.65
%), which is close to the specifications. The results are in
agreement with predictions within 30 % for the worst case chip.
Component process variations affecting the PLL bandwidth,
simplified noise models for the devices, power supply and
substrate coupling can cause the measured value to deviate
from our predicted value. Also reflections and coupling from
the testing board can significantly affect the measurements.
For this reason, the agreement between results and predictions
is quite satisfactory.
References
[1] H. Chang, A. Sangiovanni-Vincentelli, F. Balarin, E. Charbon,
U. Choudhury, G. Jusuf, E. Liu, E. Malavasi, R. Neff and P. Gray,
“A Top-down, Constraint-Driven Design Methodology for Analog Integrated Circuits”, in Proc. IEEE CICC, pp. 841–846, May
1992.
[2] R. Neff, P. Gray and A. Sangiovanni-Vincentelli, “A Module
Generator for High Speed CMOS Current Output Digital/Analog
Converters”, in Proc. IEEE CICC, pp. 481–484, May 1995.
[3] A. Demir, E. Liu, A. Sangiovanni-Vincentelli and I. Vassiliou, “Behavioral Simulation Techniques for Phase/Delay-Locked
Systems”, in Proc. IEEE CICC, pp. 453–456, May 1994.
[4] I. A. Young, J. K. Greason and K. L. Wong, “A PLL Clock Generator with 5 to 110 MHz of Lock Range for Microprocessors”,
JSSC, vol. 27, n. 11, pp. 1599–1607, November 1992.
[5] D. Reynolds, “A 320MHz CMOS Triple 8b DAC with On-Chip
PLL and Hardware Cursor”, in Proc. IEEE International SolidState Circuits Conference, pp. 50–51, February 1994.
[6] T. C. Weigandt, B. Kim and P. R. Gray, “Analysis of Timing
Jitter in CMOS Ring Oscillators”, in Proc. IEEE Int. Symposium
on Circuits and Systems, May 1994.
[7] U. Choudhury and A. Sangiovanni-Vincentelli, “Constraint Generation for Routing Analog Circuits”, in Proc. IEEE/ACM DAC,
pp. 561–566, June 1990.
[8] A. Demir, E. Liu and A. Sangiovanni-Vincentelli, “Time-Domain
non-Monte Carlo Noise Simulation for Nonlinear Dynamic Circuits with Arbitrary Excitations”, in Proc. IEEE ICCAD, pp.
598–603, November 1994.
�
 Edoardo Charbon
Edoardo Charbon