Diseño Teorico de Controladores Por LGR.
Diseño Teorico de Controladores Por LGR.
Descargar como docx, pdf o txt
También podría gustarte
- ESTRUCTURAS VigasDocumento16 páginasESTRUCTURAS VigasdaniAún no hay calificaciones
- Manual Completo PDFDocumento164 páginasManual Completo PDFMiguel AngelAún no hay calificaciones
- Ejercicios de ConvoluciónDocumento11 páginasEjercicios de ConvoluciónAngelo Karlo Huaji PeresAún no hay calificaciones
- Ensamble GuiaDocumento70 páginasEnsamble GuiaYERIXON HAMIR LUNA MELOAún no hay calificaciones
- Calculos Acetona AguaDocumento5 páginasCalculos Acetona AguaEliana picoAún no hay calificaciones
- Sistemas de Control DiscretosDocumento39 páginasSistemas de Control DiscretosIsilareAún no hay calificaciones
- Clase07 Control DigitalDocumento14 páginasClase07 Control DigitalCM35Aún no hay calificaciones
- Sistemas Dinamicos 2do OrdenDocumento3 páginasSistemas Dinamicos 2do OrdenJheison MartinezAún no hay calificaciones
- Documento Completo ModeladoDocumento52 páginasDocumento Completo ModeladoRaul Roque YujraAún no hay calificaciones
- Trabajo N°3 - TF - ICA - 2017Documento5 páginasTrabajo N°3 - TF - ICA - 2017Rodrigo RamiroAún no hay calificaciones
- Control ProporcionalDocumento20 páginasControl Proporcionaljuan camiloAún no hay calificaciones
- EL4703 - Señales y Sistemas - Repaso Semana 02Documento33 páginasEL4703 - Señales y Sistemas - Repaso Semana 02Marielos Villegas RodríguezAún no hay calificaciones
- Unidad Vi Criterio de Ziegler y NicholsDocumento11 páginasUnidad Vi Criterio de Ziegler y NicholsXavierTorresAún no hay calificaciones
- Clase 2 - Control en MatlabDocumento6 páginasClase 2 - Control en MatlabEric Mosvel100% (1)
- DIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaDocumento16 páginasDIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaAdrián AntonioAún no hay calificaciones
- Main MatlabDocumento21 páginasMain MatlabdavidrrgAún no hay calificaciones
- Características Estáticas y Dinámicas IIDocumento56 páginasCaracterísticas Estáticas y Dinámicas IIGuillermo Gallegos JaureguiAún no hay calificaciones
- 9 Control Sistemas MultivariablesDocumento21 páginas9 Control Sistemas MultivariablesLeonardoAún no hay calificaciones
- L1a Convolucion Señales DiscretasDocumento7 páginasL1a Convolucion Señales DiscretasDiego Fernando Ramirez MuñozAún no hay calificaciones
- Control de Un Sistema No Lineal Usando El Metodo de Ganancias ProgramadasDocumento12 páginasControl de Un Sistema No Lineal Usando El Metodo de Ganancias ProgramadasMario ParedesAún no hay calificaciones
- Resumen Capitulo 1 - Sistemas de Control en Tiempo Discreto, OgataDocumento8 páginasResumen Capitulo 1 - Sistemas de Control en Tiempo Discreto, OgataAngel De la TorreAún no hay calificaciones
- Lugar de Las Raices y BodeDocumento34 páginasLugar de Las Raices y Boderufino1961Aún no hay calificaciones
- Análisis de Sistemas de Control en El DominioDocumento45 páginasAnálisis de Sistemas de Control en El Dominiofernando perezAún no hay calificaciones
- Apuntes de ETN 902 Gestión 2004Documento68 páginasApuntes de ETN 902 Gestión 2004Omar CespedesAún no hay calificaciones
- KKDocumento23 páginasKKjonathan41110Aún no hay calificaciones
- Pasividad en Sistemas de Control Rev 2Documento32 páginasPasividad en Sistemas de Control Rev 2Raul Roque Yujra100% (2)
- Controlador Pid para Un Sistema Masa-Resorte Con FriccionDocumento6 páginasControlador Pid para Un Sistema Masa-Resorte Con FriccionOscar Leonardo Mosquera DussanAún no hay calificaciones
- Ecuaciones Diferenciales Lineales de Orden SuperiorDocumento15 páginasEcuaciones Diferenciales Lineales de Orden SuperiorDavid FigueredoAún no hay calificaciones
- Ciclos en ProgramaciónDocumento41 páginasCiclos en ProgramaciónEfmamjasond EskenaziAún no hay calificaciones
- Actuadores Finales de ControlDocumento22 páginasActuadores Finales de ControlRuben SanchezAún no hay calificaciones
- Clase 1 - Intro Matlab PDFDocumento61 páginasClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Introducción A Los Sistemas de Control DiscretosDocumento7 páginasIntroducción A Los Sistemas de Control DiscretosNiklaus Palerme100% (1)
- Clase 2 ConvolucionDocumento37 páginasClase 2 ConvolucionRoberto Carlos TiernoAún no hay calificaciones
- Teoría de DistribucionesDocumento4 páginasTeoría de DistribucionesEstefaniaAún no hay calificaciones
- Clase 9 - Variables de EstadoDocumento52 páginasClase 9 - Variables de EstadoYubert Edisson Huanca LimaAún no hay calificaciones
- Ejemplos de BondGraphDocumento69 páginasEjemplos de BondGraphDavid BandaAún no hay calificaciones
- Alumbrado Público Led Dimerizable Mega Aurora 140 A 200WDocumento4 páginasAlumbrado Público Led Dimerizable Mega Aurora 140 A 200WRS JosuéAún no hay calificaciones
- t.6 Lenguaje RapidDocumento52 páginast.6 Lenguaje RapidCarlos QuintillaAún no hay calificaciones
- Introduccion A Los Modelos DinamicosDocumento37 páginasIntroduccion A Los Modelos Dinamicosbeymar_5631Aún no hay calificaciones
- S11.s1-Representacion de Variables de EstadoDocumento28 páginasS11.s1-Representacion de Variables de EstadoAntonio CamiloagaAún no hay calificaciones
- Analogias ElectromecanicasDocumento13 páginasAnalogias ElectromecanicasmarcusAún no hay calificaciones
- Aplicaciones La Place 01 28070Documento10 páginasAplicaciones La Place 01 28070Roger Milla GranadosAún no hay calificaciones
- 17 Arrays PDFDocumento26 páginas17 Arrays PDFjuan hernaAún no hay calificaciones
- Cancelador de EcoDocumento9 páginasCancelador de EcomercielmAún no hay calificaciones
- Cap-4 FFTDocumento15 páginasCap-4 FFTFabricio RodríguezAún no hay calificaciones
- Numeros Complejos y Funciones Complejas Maquina Alfa Oficial SEGUNDA SEMANA PDFDocumento275 páginasNumeros Complejos y Funciones Complejas Maquina Alfa Oficial SEGUNDA SEMANA PDFJaime Joel SantosAún no hay calificaciones
- Clase 5, Modelos en Variables de EstadoDocumento28 páginasClase 5, Modelos en Variables de EstadoCarlos GarayAún no hay calificaciones
- PWMDocumento6 páginasPWMAlonso Silva GarcíaAún no hay calificaciones
- Modelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilDocumento6 páginasModelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilMiguel Sanchez BravoAún no hay calificaciones
- TEsis Raul RoqueDocumento142 páginasTEsis Raul RoqueRaul Roque YujraAún no hay calificaciones
- Bond GraphDocumento31 páginasBond GraphManuel GuijarroAún no hay calificaciones
- Estudio de Los Sistemas de Control Por Modos DeslizantesDocumento12 páginasEstudio de Los Sistemas de Control Por Modos DeslizantesRaul Roque YujraAún no hay calificaciones
- 3-7 Maquinas de EstadosDocumento40 páginas3-7 Maquinas de EstadosFabricio FebresAún no hay calificaciones
- Fase 2 Control Digital UNADDocumento9 páginasFase 2 Control Digital UNADJhonatan Florez ObandoAún no hay calificaciones
- Newton EulerDocumento16 páginasNewton EulerFelipe RamirezAún no hay calificaciones
- Resumen y Ejemplo-Diseño Realimentación EstadosDocumento17 páginasResumen y Ejemplo-Diseño Realimentación EstadosJUAN FRANCISCO VELA GAMBOAAún no hay calificaciones
- OBSERVADOR Variables de EstadoDocumento3 páginasOBSERVADOR Variables de EstadoCM35Aún no hay calificaciones
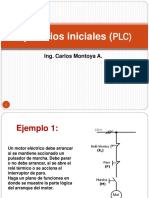
- 1.2. PLC Ejercicios InicialesDocumento6 páginas1.2. PLC Ejercicios InicialessaulAún no hay calificaciones
- Modulo I Mat C 2017 Segunda Parte PDFDocumento162 páginasModulo I Mat C 2017 Segunda Parte PDFRaeteerAún no hay calificaciones
- Mapas Conceptuales ProgramaciónDocumento2 páginasMapas Conceptuales ProgramaciónSbas PintoAún no hay calificaciones
- AUB PL2cDocumento11 páginasAUB PL2cLucia Ordiñana0% (1)
- Laboratorio 1 Aliasing ConvolucionDocumento8 páginasLaboratorio 1 Aliasing Convolucionalejandro ramonAún no hay calificaciones
- TrabajoDocumento43 páginasTrabajoDuvier Montoya ArbelaezAún no hay calificaciones
- Tarea 1 (D) Calculo MultivaribleDocumento11 páginasTarea 1 (D) Calculo MultivaribleAndres ManosalvaAún no hay calificaciones
- Segundo Libro de GeometriaDocumento61 páginasSegundo Libro de Geometriamattminyon100% (1)
- Practica 2 Carril de FletcherDocumento2 páginasPractica 2 Carril de FletcherJhon InsuastyAún no hay calificaciones
- Solucionario Semana 03 Ciclo 2018-I Pre San Marcos PDFDocumento112 páginasSolucionario Semana 03 Ciclo 2018-I Pre San Marcos PDFJose Cahuachia100% (1)
- Cargas EstructuralesDocumento28 páginasCargas Estructuralesramos685286050% (2)
- Infografia CALCULODocumento2 páginasInfografia CALCULOBrenda HerreraAún no hay calificaciones
- Equilibrio en A Educación Fisica.Documento8 páginasEquilibrio en A Educación Fisica.Mario BriceñoAún no hay calificaciones
- Primer Informe FisicaDocumento39 páginasPrimer Informe FisicaYEFERSON WILMER QUISPE CERDAAún no hay calificaciones
- Ejercicios Técnicas de Conteo (NM, Permutaciã N, Combinaciã N)Documento2 páginasEjercicios Técnicas de Conteo (NM, Permutaciã N, Combinaciã N)jasterorktamAún no hay calificaciones
- Cinemática Del PuntoDocumento12 páginasCinemática Del Puntojose chulionAún no hay calificaciones
- 627 Carlos Henao Tarea 2.Documento23 páginas627 Carlos Henao Tarea 2.carlos asdrual henao vargasAún no hay calificaciones
- Algebra Matricial Estadistica 24-01-08 PDFDocumento234 páginasAlgebra Matricial Estadistica 24-01-08 PDFjesus david chaljubAún no hay calificaciones
- Plandecontinuidad 4 OsemestreDocumento126 páginasPlandecontinuidad 4 OsemestreLeonardo Lopez RamirezAún no hay calificaciones
- Producción de Energía UndimotrizDocumento44 páginasProducción de Energía UndimotrizAlonso GuerreroAún no hay calificaciones
- Sem07 - Sesión02Documento17 páginasSem07 - Sesión02Axel G.FloresAún no hay calificaciones
- TP PenduloDocumento39 páginasTP PenduloRafa MolinaAún no hay calificaciones
- Segunda Ley de NewtonDocumento25 páginasSegunda Ley de NewtonCarolina SalcedoAún no hay calificaciones
- Microdureza Vickers y Knoop.Documento15 páginasMicrodureza Vickers y Knoop.Hanz Jesus LEON BAZANAún no hay calificaciones
- Informe 13 Fisica - OficialDocumento3 páginasInforme 13 Fisica - OficialsergioAún no hay calificaciones
- 1 - PPT de IntroduccionDocumento19 páginas1 - PPT de IntroduccionBenjamin Chumbe RomanAún no hay calificaciones
- Puentes-1-5-Combinaciones de CargaDocumento39 páginasPuentes-1-5-Combinaciones de CargaFreddy RojasAún no hay calificaciones
- Practica 1. Lab. ElecDocumento7 páginasPractica 1. Lab. ElecAlejandro JaimesAún no hay calificaciones
- Subcj GF LVM Sencilla BrizaDocumento2 páginasSubcj GF LVM Sencilla BrizaCarLos GarciaAún no hay calificaciones
- Multiplos y DivisoresDocumento18 páginasMultiplos y DivisoresEstefania MarquesAún no hay calificaciones
- Subgrupo A - Gr1 - Preinforme - Pérdidas Por FricciónDocumento14 páginasSubgrupo A - Gr1 - Preinforme - Pérdidas Por FricciónPablo Gómez EcheverriAún no hay calificaciones
- Tasas de Cambio y La Derivada Como Una FunciónDocumento21 páginasTasas de Cambio y La Derivada Como Una FunciónCamila VillarruelAún no hay calificaciones